




1.一种多地形轮式巡检机器人,其特征是,包括箱体、上摇杆和控制中心,所述箱体
左右两侧对称设置,均设有轮毂电机A、电机支架A、舵机A、舵机支架A、摇臂转向架结构、轮
毂电机B、电机支架B、轮毂电机C、电机支架C、舵机C、舵机支架C;所述轮毂电机A安装在所述
电机支架A上,所述电机支架A与所述舵机A的输出轴连接,所述舵机A安装在所述舵机支架
上;所述摇臂转向架结构包括连杆一、连杆二、连杆三、连杆四、侧摇杆、连杆五,所述连杆四
一端与所述舵机支架A连接,另一端与所述连杆三通过连接件一连接,所述连杆二与所述连
杆一通过连接件二连接,所述连杆二的另一端连接有连接件三,所述连接件一与所述连接
件三通过销轴和轴承连接,所述连接件一与所述连接件三可相对转动;所述连接件二与所
述侧摇杆、所述箱体通过销轴和轴承连接,所述轴承安装在所述箱体上,所述连接件二和所
述侧摇杆可相对箱体转动;所述侧摇杆与连杆五的一端、上摇杆连接,所述连杆五的另一端
通过Y型接头与所述箱体连接;所述连杆三的另一端与所述电机支架B连接,所述电机支架B
与所述轮毂电机B连接;所述连杆一的另一端与所述舵机支架C,所述舵机支架C用于安装舵
机C,所述舵机C的输出轴与所述电机支架C连接,所述电机支架C用于安装所述轮毂电机C;
所述控制中心包括单片机、蓄电池、轮毂电机驱动器、上位机,所述单片机、蓄电池、轮毂电
机驱动器安装在箱体上,所述蓄电池用于供电,所述单片机与所述上位机通过WiFi通讯连
接,所述单片机与轮毂电机驱动器电性连接,控制轮毂电机A、轮毂电机B、轮毂电机C的运
2.根据权利要求1所述一种多地形轮式巡检机器人,其特征是,所述蓄电池连接有电
3.根据权利要求1所述一种多地形轮式巡检机器人,其特征是,所述箱体上方设置有
云台,所述云台上搭载有摄像头与红外传感器,所述摄像头、红外传感器均与上位机通讯连
4.根据权利要求1所述一种多地形轮式巡检机器人,其特征是,所述箱体前后设置有
5.根据权利要求1所述一种多地形轮式巡检机器人,其特征是,所述箱体上方还设置
6.根据权利要求1所述一种多地形轮式巡检机器人,其特征是,所述轮毂电机B位于
所述轮毂电机A和所述轮毂电机C的中间,当移动平台位于水平面时,轮毂电机A、轮毂电机
7.根据权利要求1所述一种多地形轮式巡检机器人,其特征是,所述连杆一、连杆二、
8.根据权利要求1所述一种多地形轮式巡检机器人,其特征是,所述箱体是采用铝型
9.根据权利要求1所述一种能爬楼梯的移动机器人,其特征是,所述箱体上方还设置
单,在设定的工作环境下稳定性良好,但是它们难以应对复杂的工作环境,大多都在路面环
境较好的场所工作。例如,大型的商场、步行街与医院等。而能适应多地形的巡检机器人多
为腿式移动机器人、履带式移动机器人或轮履式移动机器人。而他们相比于轮式机器人又
一种多地形轮式巡检机器人,包括箱体、上摇杆和控制中心,所述箱体左右两侧对
称设置,均设有轮毂电机A、电机支架A、舵机A、舵机支架A、摇臂转向架结构、轮毂电机B、电
机支架B、轮毂电机C、电机支架C、舵机C、舵机支架C;所述轮毂电机A安装在所述电机支架A
上,所述电机支架A与所述舵机A的输出轴连接,所述舵机A安装在所述舵机支架上;所述摇
臂转向架结构包括连杆一、连杆二、连杆三、连杆四、侧摇杆、连杆五,所述连杆四一端与所
述舵机支架A连接,另一端与所述连杆三通过连接件一连接,所述连杆二与所述连杆一通过
连接件二连接,所述连杆二的另一端连接有连接件三,所述连接件一与所述连接件三通过
销轴和轴承连接,所述连接件一与所述连接件三可相对转动;所述连接件二与所述侧摇杆、
所述箱体通过销轴和轴承连接,所述轴承安装在所述箱体上,所述连接件二和所述侧摇杆
可相对箱体转动;所述侧摇杆与连杆五的一端、上摇杆连接,所述连杆五的另一端通过Y型
接头与所述箱体连接;所述连杆三的另一端与所述电机支架B连接,所述电机支架B与所述
轮毂电机B连接;所述连杆一的另一端与所述舵机支架C,所述舵机支架C用于安装舵机C,所
述舵机C的输出轴与所述电机支架C连接,所述电机支架C用于安装所述轮毂电机C;所述控
制中心包括单片机、蓄电池、轮毂电机驱动器、上位机,所述单片机、蓄电池、轮毂电机驱动
器安装在箱体上,所述蓄电池用于供电,所述单片机与所述上位机通过WiFi通讯连接,所述
单片机与轮毂电机驱动器电性连接,控制轮毂电机A、轮毂电机B、轮毂电机C的运转;所述单
进一步地,所述箱体上方设置有云台,所述云台上搭载有摄像头与红外传感器,所
进一步地,所述箱体前后设置有避障雷达,所述避障雷达与所述单片机通讯连接。
进一步地,所述轮毂电机B位于所述轮毂电机A和所述轮毂电机C的中间,当移动平
台位于水平面时,轮毂电机A、轮毂电机B、轮毂电机C三轮的俯视面与箱体底面平行。
进一步地,所述连杆一、连杆二、连杆三、连杆四、侧摇杆、连杆五、上摇杆上均开有
进一步地,所述箱体上方还设置有航插、USB接口可用于后续控制管理系统的开发以增
本发明的有益效果是:本发明具有越障性能优良、体积小、质量轻的特点。该机器
人可以在不同的路面上行走,而不局限于城市道路,除此之外,还能够最终靠摄像头、传感器
等对机器人的旁边的环境进行在线视频监控,以达到检查环境的目的。结构方面,本发明采用
了摇臂转向架结构作为机器人的支撑件代替了悬架的功能,使得机器人两侧在其中一侧越
障时另一侧不受干扰,同时大幅度的提升了越障能力。本发明采用了六个轮毂电机进行驱动,在
提供动力的同时,能配合摇臂转向架结构使其可以在一定程度上完成爬楼梯等复杂的越障功能。本发
明采用了四个舵机进行转向,使得机器人更灵活,可以实现原地转向与差速转向。本发明
采用骨架外包裹铝合金板的形式构建箱体,降低了机器人的质量。本发明在摇臂转向架结
构的杆件长度上进行了设计(满足轮毂电机B位于所述轮毂电机A和所述轮毂电机C的中间,
当机器人位于水平面时,轮毂电机A、轮毂电机B、轮毂电机C三轮的俯视面与箱体底面平
行),以保证前后轮转动中心到中间轮转动中心的距离相等,降低了车轮的磨损与杆件所受
的轴向力。本发明在杆件上开槽,在一定程度上降低了机器人的质量,同时,可以保护并隐
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
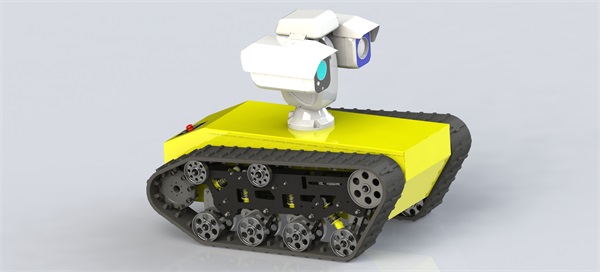
如图1‑3所示,本实施例提供了一种能爬楼梯的移动机器人移动平台,包括箱体1、
上摇杆2和控制中心,所述箱体1左右两侧对称设置,均设有轮毂电机A101、电机支架A102、
舵机A103、舵机支架A104、空间连杆机构105、轮毂电机B106、电机支架B107、轮毂电机C108、
电机支架C109、舵机C110、舵机支架C111;所述轮毂电机A101安装在所述电机支架A102上,
所述电机支架A102与所述舵机A103的输出轴连接,所述舵机A103安装在所述舵机支架A104
上;所述空间连杆机构105包括连杆一1051、连杆二1052、连杆三1053、连杆四1054、侧摇杆
1055、连杆五1056,所述连杆四1054一端与所述舵机支架A104连接,另一端与所述连杆三
1053通过连接件一112(图6)连接,所述连杆二1052与所述连杆一1051通过连接件二113(图
7)连接,所述连杆二1052的另一端连接有连接件三114,所述连接件一112与所述连接件三
114通过销轴和轴承连接,所述连接件一112与所述连接件三114可相对转动,连接件一112
与连接件三114具体连接如图4所示,是通过四个轴承A1121和一个销轴A1122进行连接,其
相接处设有垫片1123,并采用卡簧1124固定销轴A1122;连接件一112与连接件三114内分别
安装有两个轴承A1121,连杆四1054与连杆三1053均与连接件一112连接,可采用螺纹+螺栓
的方式连接,连接件一112内有内螺纹,连杆四1054与连杆三1053连接处上均设有外螺纹,
内、外螺纹配合连接,再侧面攻螺栓固定,连杆二1052与连接件三114的连接也是相同的方
式;所述连接件二113、所述侧摇杆1055与所述箱体1通过销轴B1132和轴承B1131连接,所述
轴承B1131安装在所述箱体1上,连接件二113、侧摇杆1055可相对箱体1转动,如图4所示,连
杆二1052与连杆一1051是通过连接件二113连接在一起的,没有自由度,轴承B1131安装在
箱体1上,安装完成后,连杆二1052、连杆一1051、侧摇杆1055可相对箱体1转动;所述侧摇杆
1055与连杆五1056的一端、上摇杆2连接,所述连杆五1056的另一端通过Y型接头115与所述
箱体1连接,这样连杆五1056、上摇杆相对箱体1具有自由度构成一个转动副;所述连杆三
1053的另一端与所述电机支架B107连接,所述电机支架B107与所述轮毂电机B106连接;所
述连杆一1051的另一端与所述舵机支架C111,所述舵机支架C111用于安装舵机C110,所述
舵机C110的输出轴与所述电机支架C109连接,所述电机支架C109用于安装所述轮毂电机
C108。所述轮毂电机B106位于所述轮毂电机A101和所述轮毂电机C108的中间,当移动平台
位于水平面时,轮毂电机A101、轮毂电机B106、轮毂电机C108三轮的俯视面与箱体1底面平
行。所述控制中心安装在所述箱体上,如图8所示,所述控制中心包括单片机(STM32F405)、
上位机(PC)蓄电池、轮毂电机驱动器、超声波雷达38、变送器、电量显示器33,报警灯37、摄
像头与红外温度传感器,所述蓄电池用于给控制中心的用电元件供电,且各个用电元件之
间串联形成回路;所述蓄电池连接有电量显示器,由电量显示器显示其电量;所述箱体上方
设置有云台31,摄像头、红外温度传感器安装在云台上,摄像头用于获取机器人周边环境并
对其加以监测,红外传感器用于获取机器人周边的温度信息,可用于监测火灾、发热人群识
别等;所述单片机通过CAN作为通讯方式控制舵机A、舵机C运转,通过RS485作为通讯方式与
轮毂电机驱动器通讯,从而控制轮毂电机运转,从而控制机器人的位置;所述摄像头与红外
传感器安装在云台上,可直接与上位机通讯,所述上位机与所述单片机通过WiFi通讯连接;
所述超声波雷达通过变送器与单片机的连接,超声波雷达安装在箱体前后,用于避障。所述
箱体上方还设置有航插35、USB接口36可用于后续控制系统的开发以增添机器人控制系统
的功能。所述控制中心还包括启停开关32、急停开关34,用于日常开关或突发情况的急停。
作为本实施例的优选方案,所述连杆一1051、连杆二1052、连杆三1053、连杆四
作为本实施例的优选方案,所述箱体1是采用铝型材搭建骨架,骨架外包裹铝合金
工作时,单片机通过CAN作为通讯方式控制Y14伺服电机/舵机,通过RS485作为通
讯方式控制轮毂电机,从而控制机器人的位置,伺服电机通过螺栓与舵机支架与轮毂电机
支架连接,轮毂电机支架与轮毂电机相连接,伺服电机可以控制轮毂电机支架转动,从而带
动轮毂电机转动。摇臂转向架结构与箱体构成了三个转动副,在越障过程中既能轻松实现攀
爬的功能也可以保证单边越障时两边互不干扰。在单边越障时摇臂,转向架结构中的上摇
杆可发生转动,使得另一侧车轮与地面有良好接触。本发明在箱体的前板与后板上安装了
避障雷达,前后各两个。利用避障雷达可以让机器人提前识别障碍物,达到避障的效果。当
机器人需越过单侧障时,单侧轮毂电机A抬起,单侧连接杆四与连接杆三顺时针转动,其转
动中心随机器人的运动向上抬起,带动单侧连接杆二与连接杆一顺时针转动(绕轮毂电
机C圆心)。随机器人的前进,单侧轮毂电机A向下运动,机器人恢复原来的运动状态。随着
机器人继续前进,单侧轮毂电机B抬起,单侧连接杆四与连接杆三逆时针转动,其转动中心
随机器人的运动向上抬起,之后其他结构的运动状态与轮毂电机A越障时同理。当单侧轮
毂电机C通过障碍物时单侧连接杆二与连接杆一逆时针转动(绕连接杆二与连接杆三连接
的转动副),侧摇杆逆时针转动,连杆五向前运动,上摇杆顺时针运动(俯视);当机器人两侧
越障时,两侧轮毂电机A抬起,两侧连接杆四与连接杆三顺时针转动,其转动中心随着机器
人移动向上抬起,带动两侧连接杆二与连接杆一顺时针转动(绕轮毂电机C圆心),随着机器
人的前进,两侧轮毂电机A向下运动,机器人恢复原来的运动状态。随机器人继续前进,两
侧轮毂电机B抬起,两侧连接杆四与连接杆三逆时针转动,其转动中心随着机器人的运动向
上抬起,之后其他结构的运动状态与两侧轮毂电机A越障时同理,当两侧轮毂电机C通过障
碍物时单侧连接杆二与连接杆一逆时针转动(绕该侧的连接杆二与连接杆三连接的转动
其依然可以对前述各实施例所记载的技术方案做修改,或者对其中部分技术特征进行等
同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本